#STM32 microcontrollers
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
The most popular pages on Tumblr are about Minecraft, GIFs, and David J. Peterson.
Text
STMicroelectronics and Qualcomm Launch Mass Production of ST67W611M1 Wi-Fi 6/Bluetooth 5.4 Module for STM32 Ecosystem
June 9, 2025 /SemiMedia/ — STMicroelectronics has commenced mass production of the ST67W611M1 module, a compact solution integrating Wi-Fi 6 and Bluetooth Low Energy 5.4, developed in collaboration with Qualcomm Technologies. This module simplifies the implementation of wireless connectivity in systems utilizing STM32 microcontrollers, reflecting the successful realization of the partnership…
#Bluetooth 5.4 module#electronic components news#Electronic components supplier#Electronic parts supplier#IoT connectivity#PSA Certified Level 1#Qualcomm Technologies#STM32 microcontrollers#STMicroelectronics#Wi-Fi 6 module
0 notes
Text
Programming Embedded Systems (with C and GNU Development Tools)
[Programming Embedded Systems (with C and GNU Development Tools). By Michael Barr & Anthony J Massa. 2nd Edition, 1 October 2006. Publisher: O'Reilly Media. Paperback: 301 pages, Dimensions: 17.78 x 1.98 x 23.34 cm. ISBN: 978-0-596-00983-0]
In the past 15 months or so I elected to expand my personal and professional skill set to include working with small computing systems, sometimes referred to as microcontrollers. These devices have become virtually omnipresent, in everything from automobiles and bar-code scanners to toasters and doorbells. If you operate a late-model vehicle, for instance, you may have as many as 70 (!) of these devices in the car controlling everything from the fuel mixture to emissions to anti-lock brakes and collision avoidance sensing.
I was interested in moving into this arena as part of my career, as there were many openings for people with a strong understanding of the imperatives attendant on both the software and hardware of embedded systems. I knew a bit about the electronics side of things and I have done software development of one sort or another most of my 40+ years as a professional, but this arena poses unique challenges and opportunities. I knew I needed to do some specialized self-teaching, and this book seemed like a great place to start.
To start with, what exactly is an embedded system?
As the name implies, it is a system - in this case a miniature computing device - that is a component of a larger framework. This larger framework can take on myriad forms. Some of the largest such frameworks are satellite networks. The embedded system comprises hardware - a central processing unit, or CPU, along with some (minimal) on-board memory and one or more electrical interfaces (e.g. a USB or RJ45 jack) through which it can communicate with the outside world.
Unlike the computers most of us are familiar with, such as Windows or MacOS-based laptops or Linux servers, these devices often do not have an operating system (WIndows, MacOS and Linux are all operating systems) that performs many of the low-level functions needed to keep the device running and useful.
This keeps the device flexible in terms of how it can be used, but at the expense of more detailed and subtle development and maintenance requirements. Thus, the "software" on an embedded system may be a very small bit of computer code that simply turns on the interfaces electrically and then waits for something to happen.
Programming software for these systems is intriguing but fraught with issues that an ordinary computer user never sees.
For example, given that the memory and interface resources on these devices tend to be rather modest, it's necessary for the programmer to take care of any bookkeeping that is necessary to keep the basic functions from colliding. If one of the interfaces is used to provide a scanned barcode to a waiting receiver, it must pass that information through some on-board memory first.
The embedded software designer needs to be sure that this information can't be corrupted, or "clobbered", by a competing task that might be, for instance, putting the scanning laser into sleep mode to save power. Moreover, there are cases where the same locations in memory need to be shared by tasks as a part of getting work done.
But what happens if one task is trying to write data to a specific memory location while another task is trying to read from it? Is there always a specific order in which this happens? What happens if either operation is incomplete for some reason? Will the device recover and continue to operate, or will it lock up? The aforementioned are but a tiny set of examples that the developer must bear in mind.
Messrs Barr and Massa have many decades of experience between the two of them in just these kinds of environments. I was delighted to see just how easy this book is to read and how thoroughly they cover all of the issues that accompany such a software development enterprise. They are careful to create and explain examples that use commonly-available development kits (I use an STM32 ARM Cortex-M Development Board myself; there is a photo of one such system below) and free or nearly-free software tools to break down the barriers to entry in this field.

This book is really as much about operating system design as it is about microcontroller software development; if one is interested in what nearly every operating system must do, this volume talks all about it.
Above and beyond this, it is a wealth of anecdotes, sample code, and general wisdom that will really ease the novice into this exciting world of programming and small-device control.
I highly recommend it to anyone who wants to get down on the bare metal with computers. It is necessary to be at least familiar with the C programming language (almost all of the examples are coded in C) and it would be very helpful to have worked with at least one Assembly language as well. Beyond that, the only requirement for getting the most out of the book is a willingness to experiment and be delighted.


Image Credits (from above down; with thanks to copyright owners): (1) STM32 ARM Cortex-M Development Board © Copyright Owner, date unknown (2) Book Cover © O'Reilly Media 11 October 2006 (3) Michael Barr © Barr Group 2012-2025. (Anthony J Massa, no photograph found)
Kevin Gillette
Words Across Time
4 February 2025
wordsacrosstime
#Words Across Time#Kevin Gillette#wordsacrosstime#February 2025#Michael Barr#Anthony Massa#O'Reilly Media#Embedded Systems#C#Satellite Networks#Electrical Interfaces#MacOS#Linux#Flexible#Computer Code#Barcode#Scanning Laser#Memory Location#STM32#Microcontrollers#Anecdotes#Assembly Language#Sample Code#General Wisdom#Computers
0 notes
Text
Blog o tworzeniu systemów monitoringu i zarządzania produkcją (MES)
Po co w ogóle te systemy Przykłady problemów, które mogą rozwiązywać takie systemy
Jakiego sprzętu używam
================================================
Ponieważ to mój pierwszy post, zacznę od opowiedzenia trochę o tych systemach, dlaczego akurat one i jak doszedłem do tego. Takie systemy mają doskonałe zastosowanie w produkcji do optymalizacji, poprawy komunikacji z pracownikami, monitorowania linii produkcyjnych. Obecnie rozważam możliwość integracji systemów magazynowych, ale jak dotąd mam w tym zbyt mało doświadczenia. Dla tych, którzy pracują na dużych zakładach produkcyjnych lub nimi zarządzają - prawdopodobnie takie systemy nie będą niczym nowym, a istnieje prawdopodobieństwo, że już używają najnowocześniejszych spośród nich (proszę o napisanie o tym w komentarzach. Myślę, że będzie to interesujące nie tylko dla mnie).
Dlaczego wybrałem tę ścieżkę zawodową? Początkowo chciałem produkować maszyny produkcyjne, ale do tego potrzebna jest poważna baza materialna i dość duża ekipa. Rozważałem także poszukiwanie inwestycji, ale to nie moja droga. Ostatecznie zdecydowałem się pomagać ludziom w efektywniejszym prowadzeniu procesów produkcyjnych. Być może to jeszcze nieco zbliży technologiczną singularność.
Dlaczego ja nie chcę sprzedawać gotowych rozwiązań, pracując z dużymi firmami? To mnie nie jest interesujące. Lubię tworzyć technologie. Szukać nowych rozwiązań technologicznych. Chcę także uczynić te technologie dostępnymi.
================================================
Przeanalizujmy jeden konkretny, choć niewielki, przykład, który zrealizowałem: Klient skarży się na niską jakość opakowania/braki w kompletacji towaru/możliwe złe stan towaru lub inne podobne problemy. Logicznym rozwiązaniem jest sprawdzenie procesu pakowania i przechowywania towaru. Pierwsze rozwiązanie, które przychodzi do głowy, to zawieszenie kamery monitoringu, ale jest to nieefektywne czasowo (kto będzie przeglądać materiał? a jeśli jest 10-20 punktów pakowania?). Kierownik także nie będzie w stanie kontrolować wszystkiego i wszystkich, a kontrola jakości nie może otwierać opakowań. Bardziej rozsądnym rozwiązaniem tej sytuacji jest stworzenie systemu, który będzie robił zdjęcia z kamery monitoringu (dowolnej dostępnej przez sieć) po naciśnięciu przycisku lub zeskanowaniu kodu kreskowego/znacznika RFID. Wszystkie dane zostaną zapisane na serwerze i łatwo będzie można przeglądać potrzebne informacje, zdjęcia. Może nawet kilka zdjęć z różnych kamer, w zależności od zadań. Oczywiście wprowadzanie danych do systemu ERP, innej bazy danych lub serwera. Taki system można również zastosować na każdym etapie produkcji, ale z pewnymi modyfikacjami. Taki system napisałem w Pythonie i świetnie się sprawdził, chociaż musiałem go testować i przerabiać, ponieważ pierwsza wersja była zbyt niepraktyczna i miała nieczytelny kod. Pod względem sprzętu nie było to drogie - kamery IP, przełączniki PoE, kable, skanery kodów kreskowych (najlepiej sprawdziły się skanery Zebra. Tanie skanery okazały się niskiej jakości), niewielkie monitory dotykowe oraz komputery Thin-client (okazały się tańsze niż Raspbery-Pi). Trudno oszacować czasowo, ponieważ najwięcej czasu zajęło testowanie rozwiązania, które trwało dość długo, ale sama praca nad projektem zajęła mi kilka tygodni.
Myślę, że implementacja w C++ zajęłaby o wiele dłużej, 2-3 razy, ale ponieważ nie było to krytyczne, a komputery sobie poradziły, chociaż z pewną optymalizacją kodu - postanowiono użyć Pythona.
================================================
Jeśli chodzi ogólnie o moją pracę, to pod względem sprzętu skupiam się na zwykłych komputerach, mikrokontrolerach STM32, jednopłytkowych komputerach, różnorodnych urządzeniach peryferyjnych z różnymi protokołami. Obecnie rozważam również możliwość pracy z Androidem (interfejsy internetowe nie zawsze są wygodne i często występują trudności z autonomią i szybkością).
W każdym przypadku przy takim rozszerzaniu technologii konieczne będzie zatrudnienie dodatkowych specjalistów do zespołu.
Jeśli społeczność jest zainteresowana tym, co piszę - proszę zadawać pytania w komentarzach, pisać, które tematy są nadal interesujące, możesz dodać swoje pomysły i sugestie.
1 note
·
View note
Note
Ok, I feel like you could answer this: as processor designs iterate and use new technology and design paradigms, why don't we see more modern re-issues of lower spec processors? Wouldn't (or couldn't), say, a 68000 made with modern procedures and as small as we could make one now draw even less power than the original?
Thats generally because if a new processor is getting manufactured people are going to want more modern features so you'll get something with similar specs to an old processor but now it can do X cryptographic operation in a more optimized way or like you mentioned it draws less power or it gets smaller. There's interesting stuff that happens with that like you'll get a microprocessor with similar or greater specs so it's possible to run old programs off a microcontroller or something even smaller. For a practical example many ESP32 boards have better specs then an original GBA so people have kicked around different console designs with them. Including a console you may have heard of, The Playdate uses a STM32 and an ESP32 (though to be fair the ESP32 is used for communication primarily as far as I can tell)
6 notes
·
View notes
Text
I think circular buffers on the STM32 microcontroller gave me PTSD. Btw does anyone else think that the STM32 CubeIDE Hardware abstraction layer suck?
24 notes
·
View notes
Text
This is STM32F103C6T6 Development Board STM32 ARM Core Module. This board is a low-cost Minimum System Development Board for ARM Microcontroller STM32F103C6T6. Board is suitable for learners that want to learn the STM32 microcontroller with ARM Cortex-M3 32-bit core.
Board is suitable for learners that want to learn STM32 microcontroller with ARM Cortex-M3 32-bit core.
2 notes
·
View notes
Text
Mechatronic Design Engineer: Bridging Mechanical, Electrical, and Software Engineering
The role of a Mechatronic Design Engineer is at the cutting edge of modern engineering. Combining the principles of mechanical engineering, electronics, computer science, and control systems, mechatronic engineers design and develop smart systems and innovative machines that improve the functionality, efficiency, and intelligence of products and industrial processes. From robotics and automation systems to smart consumer devices and vehicles, mechatronic design engineers are the architects behind today’s and tomorrow’s intelligent technology.
What Is Mechatronic Engineering?
Mechatronics is a multidisciplinary field that integrates various engineering disciplines to design and create intelligent systems and products. A mechatronic system typically consists of mechanical components (such as gears and actuators), electronic systems (sensors, controllers), and software (embedded systems and algorithms).
In practical terms, a Mechatronic Design Engineer might work on:
Industrial robots for factory automation.
Autonomous vehicles.
Consumer electronics (like smart appliances).
Medical devices (robotic surgery tools, prosthetics).
Aerospace systems.
Agricultural automation equipment.
These professionals play a vital role in building machines that can sense, process, and respond to their environment through advanced control systems.
Core Responsibilities of a Mechatronic Design Engineer
Mechatronic design engineers wear multiple hats. Their responsibilities span the design, simulation, testing, and integration of various components into a unified system. Key responsibilities include:
Conceptual Design:
Collaborating with cross-functional teams to define product requirements.
Designing mechanical, electrical, and software systems.
Creating prototypes and evaluating design feasibility.
Mechanical Engineering:
Designing moving parts, enclosures, and structures using CAD tools.
Selecting materials and designing components for performance, durability, and manufacturability.
Electrical Engineering:
Designing circuit boards, selecting sensors, and integrating microcontrollers.
Managing power systems and signal processing components.
Embedded Systems and Software Development:
Writing control algorithms and firmware to operate machines.
Programming in languages like C, C++, or Python.
Testing and debugging embedded software.
System Integration and Testing:
Bringing together mechanical, electrical, and software components into a functional prototype.
Running simulations and real-world tests to validate performance.
Iterating design based on test data.
Project Management and Documentation:
Coordinating with suppliers, clients, and team members.
Preparing technical documentation and user manuals.
Ensuring compliance with safety and industry standards.
Skills Required for a Mechatronic Design Engineer
Being successful in mechatronic engineering requires a broad skill set across multiple disciplines:
Mechanical Design – Proficiency in CAD software like SolidWorks, AutoCAD, or CATIA.
Electronics – Understanding of circuits, PCB design, microcontrollers (e.g., Arduino, STM32), and sensors.
Programming – Skills in C/C++, Python, MATLAB/Simulink, and embedded software development.
Control Systems – Knowledge of PID controllers, motion control, automation, and feedback systems.
Problem Solving – Ability to approach complex engineering problems with innovative solutions.
Collaboration – Strong communication and teamwork skills are essential in multidisciplinary environments.
Industries Hiring Mechatronic Design Engineers
Mechatronic engineers are in demand across a wide array of industries, including:
Automotive: Designing autonomous and electric vehicle systems.
Robotics: Creating robotic arms, drones, and autonomous platforms.
Manufacturing: Developing automated assembly lines and CNC systems.
Medical Devices: Designing wearable health tech and robotic surgery tools.
Aerospace: Building UAVs and advanced flight control systems.
Consumer Electronics: Creating smart appliances and personal tech devices.
Agriculture: Developing automated tractors, irrigation systems, and crop-monitoring drones.
Mechatronics in the Age of Industry 4.0
With the rise of Industry 4.0, smart factories, and the Internet of Things (IoT), the demand for mechatronic design engineers is rapidly increasing. These professionals are at the forefront of integrating cyber-physical systems, enabling machines to communicate, adapt, and optimize operations in real-time.
Technologies such as AI, machine learning, digital twins, and cloud-based monitoring are further expanding the scope of mechatronic systems, making the role of mechatronic engineers more strategic and valuable in innovation-driven industries.
Career Path and Growth
Entry-level mechatronic engineers typically begin in design or testing roles, working under experienced engineers. With experience, they may move into project leadership, system architecture, or R&D roles. Others transition into product management or specialize in emerging technologies like AI in robotics.
Engineers can further enhance their careers by obtaining certifications in areas like:
PLC Programming
Robotics System Design
Embedded Systems Development
Project Management (PMP or Agile)
Advanced degrees (MS or PhD) in mechatronics, robotics, or automation can open opportunities in academic research or senior technical roles.
Future Trends in Mechatronic Design Engineering
Human-Robot Collaboration: Cobots (collaborative robots) are transforming how humans and robots work together on factory floors.
AI and Machine Learning: Enabling predictive maintenance, adaptive control, and smarter decision-making.
Wireless Communication: Integration with 5G and IoT platforms is making mechatronic systems more connected.
Miniaturization: Smaller, more powerful components are making devices more compact and energy-efficient.
Sustainability: Engineers are designing systems with energy efficiency, recyclability, and sustainability in mind.
Conclusion
A Mechatronic Design Engineer by Servotechinc plays a pivotal role in shaping the future of intelligent machines and systems. As industries become more automated and interconnected, the demand for multidisciplinary expertise continues to rise. Mechatronic engineering offers a dynamic and rewarding career path filled with opportunities for innovation, creativity, and impactful problem-solving. Whether you’re designing a robot that assembles products, a drone that surveys farmland, or a wearable medical device that saves lives—mechatronic design engineers are truly the bridge between imagination and reality in the world of modern engineering.
0 notes
Text
Programming STM32 with Rust: Embedded Guide
1. Introduction 1.1 Brief Explanation STM32 microcontrollers are a popular choice for embedded systems due to their performance, versatility, and extensive peripheral set. Rust, a modern systems programming language, offers memory safety guarantees without compromising on performance, making it an excellent choice for embedded development. This guide will walk you through programming STM32…
0 notes
Text
Getting Started with Embedded Systems Programming

Embedded systems programming is the backbone of modern electronics. From smartwatches to washing machines, embedded systems power the intelligent functions of countless everyday devices. This guide will introduce you to the basics of embedded programming, key tools, and how to begin building your own embedded applications.
What is an Embedded System?
An embedded system is a computer integrated into a larger system or device, performing dedicated functions. Unlike general-purpose computers, embedded systems are designed for specific tasks, often with constraints on power, memory, and processing.
Examples of Embedded Systems:
Microcontrollers in home appliances
Sensor-based devices (e.g., temperature sensors, motion detectors)
Medical equipment
Automotive control systems
IoT (Internet of Things) gadgets
Core Components of an Embedded System
Microcontroller or Microprocessor: The brain of the embedded system (e.g., Arduino, STM32, ESP32).
Memory: RAM and ROM to store instructions and data.
Input/Output Interfaces: Connects to sensors, displays, motors, and communication modules.
Software: Custom firmware developed for specific functions, typically in C or C++.
Popular Programming Languages
C: Most widely used due to its efficiency and low-level hardware access.
C++: Used when object-oriented design is required.
Assembly: For highly optimized or time-critical routines.
MicroPython: Python for microcontrollers (e.g., ESP8266, Micro:bit).
Getting Started with Embedded Programming
Select Your Platform:
Beginners: Arduino (easy setup, wide community support)
Advanced: STM32, Raspberry Pi Pico, ESP32
Set Up Your Development Environment:
Install IDEs like Arduino IDE, PlatformIO, STM32CubeIDE
Download necessary drivers and board support packages
Write and Upload Code: Create simple programs like blinking an LED, then expand to sensors, displays, and communication modules.
Example: Blink an LED with Arduino
void setup() { pinMode(13, OUTPUT); // Set pin 13 as output } void loop() { digitalWrite(13, HIGH); // Turn LED on delay(1000); // Wait for 1 second digitalWrite(13, LOW); // Turn LED off delay(1000); // Wait for 1 second }
Tools and Debugging
Serial Monitor: For real-time debugging and logging.
Oscilloscope & Logic Analyzer: For electrical signal inspection.
In-Circuit Debuggers: Like JTAG or ST-Link for low-level debugging.
Best Practices
Write modular and readable code.
Use debouncing for physical inputs like buttons.
Handle memory carefully to avoid overflows.
Optimize power usage in battery-powered devices.
Conclusion
Embedded systems programming is both fun and powerful, offering endless possibilities for innovation in hardware and software. Whether you’re building a home automation project or diving into the world of IoT, understanding the basics of embedded programming gives you the foundation to create smart, responsive devices.
0 notes
Text
Master the STM32 to create a sophisticated heart rate monitor
This design is based on a low-cost, high-precision method centered around the STM32F103ZET6. It employs a pulse sensor to detect and collect the human pulse. Using the microcontroller's timer/counter, it measures the heart rate, with digital display and voice broadcast controlled by the microcontroller. This ensures quick and accurate heart rate measurements. Additionally, when an abnormal heart rate is detected, the DS18B20 alarm module alerts the user to pay attention to heart rate monitoring.
Chapter 1: Introduction
Heart rate refers to the number of times the heart beats per minute. It is an important parameter reflecting whether the heart is functioning normally, and the value of the heart rate is also a crucial indicator for assessing both physical labor intensity and mental work intensity. Therefore, measuring heart rate is an excellent method for evaluating a patient's physiological status.
A heart rate monitor is a medical device used to measure heart rate values. Its application plays a significant role in the research and diagnosis of cardiovascular diseases, as the bioelectrical signals it records during cardiac activity have become vital for clinical diagnosis. With the continuous development and progress of modern medicine, the demands on various measurement instruments are naturally increasing. Based on previous research, we have developed and designed a cost-effective electronic heart rate monitor. This device addresses the inaccuracies and randomness of traditional measurement methods, providing precise heart rate measurements and displaying the results digitally in real-time, thus making heart rate values more intuitive.
Chapter 2: Design Plan
The basic principle of photoplethysmography (PPG) is to measure pulse rate using the variation in light transmission caused by blood vessel pulsation. The sensor used consists of two parts: a light source and a photoelectric transducer, which can be attached to a patient's finger or earlobe using a strap or clip. The light source typically uses light-emitting diodes (LEDs) with specific wavelengths (500nm~700nm) that selectively target arterial oxygen and hemoglobin. When the light beam passes through peripheral blood vessels, the transmission rate changes due to volumetric changes caused by arterial pulsations. The photoelectric converter then receives the light reflected by the body tissues, converting it into electrical signals, amplifying and outputting them. Since the pulse rate is a periodically changing signal corresponding to the heartbeat, with periodic changes in arterial blood volume, the period of change in the electrical signal from the photoelectric converter represents the pulse rate.
Chapter 3: Overview of Hardware Circuit
3.1 Principles of Heart Rate Monitor Design
According to design requirements, this design employs the STM32F103ZET6 as the control CPU, with peripheral devices including the digital temperature sensor DS18820, phototransistors, a voice module, decoders, latches, amplifiers, etc. The project adopts a bus control mode, with three-digit static digital display.
3.2 Pulse Sensor Principle
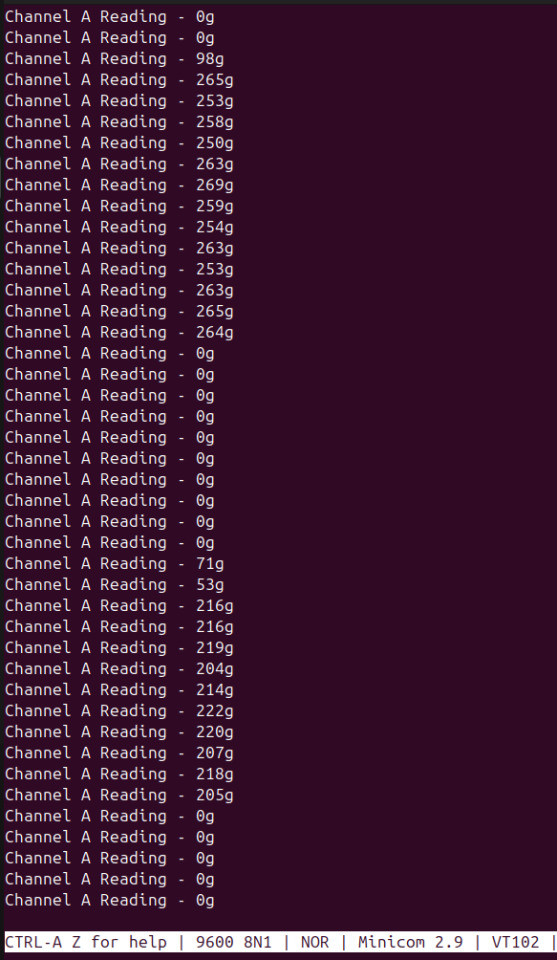
The PulseSensor is a photoplethysmographic analog sensor used for heart rate measurement. Worn on the finger or earlobe, it transmits collected analog signals via wires to the STM32F103ZET6 microcontroller, where they are converted into digital signals. Simple calculations by the STM32 yield the heart rate value, and the pulse waveform can also be transmitted to a computer via a serial port for display.
Due to the extremely weak pulse signal and its limited vibration amplitude, collecting and obtaining the signal can be quite challenging. Not only is the pulse signal itself weak, but it is also prone to interference, as physiological signals from different parts of the body interact and influence each other. Furthermore, emotional variations such as joy, anger, sorrow, and happiness can also affect physiological signals, leading to noise interference in the pulse signal. Therefore, selecting an appropriate pulse measurement sensor is crucial for obtaining accurate, efficient, and reliable pulse signals. The frequency of the pulse signal is very low, with typical values as follows: males have 60-100 beats per minute, females 70-90 beats per minute, and children around 90 beats per minute.
Pin functions are as follows:
S — Pulse signal output (connected to microcontroller AD interface)
VCC — 5V (or 3.3V) power input
GND — Ground
3.3 ISD1820 Voice Module
Pin function introduction:
Power (VCC): Convergence point for different internal power buses of the chip's analog and digital circuits, minimizing noise. Decoupling capacitors should be placed close to the chip.
Ground (VSSA, VSSD): Convergence point for different ground lines of the chip's internal analog and digital circuits.
Record (REC): Active high; recording starts when REC goes high, regardless of whether the chip is in power-saving mode or playback mode. Recording continues while REC is high and stops when REC goes low or the memory is full, writing an End-of-Message (EOM) mark.
Edge Trigger Playback (PLAYE): Playback starts on rising edge, continues until EOM mark or end of memory, and then enters power-saving mode.
Level Trigger Playback (PLAYL): Playback starts when this pin goes high and continues until it returns to low, encounters an EOM mark, or reaches the end of memory, entering power-saving mode afterward.
Recording Indicator (/RECLED): Low during recording, can drive an LED; outputs a low pulse upon encountering an EOM mark during playback, useful for triggering PLAYE for looping playback.
Microphone Input (MIC): Connects to the internal pre-amplifier. External microphone should be coupled via a series capacitor.
Microphone Reference (MIC REF): Inverting input of the pre-amplifier, improving common-mode rejection ratio when connected differentially.
Speaker Output (SP+, SP-): Directly drives an 8Ω speaker; dual-ended output increases power by four times without coupling capacitors.
Oscillation Resistor (ROSC): Connected oscillation resistor determines recording and playback time.
Pass-through Mode (FT): Allows external audio signals at MIC input to pass through internal AGC circuit, filter, and speaker driver to reach speaker output directly when FT is high and REC, PLAYE, and PLAYL are low.
Chapter 4: Program Design
4.1 Main Program Design
Program functionalities: By detecting high or low levels at port P1.0, the program can collect, convert, and process temperature data and electrocardiogram signals, finally displaying heart rate and temperature values on a digital tube. Additionally, the speech subroutine can announce these values, and an alert module can notify the user if the heart rate falls outside the set range, prompting attention to physical health.
Designing the main program flowchart is a crucial step, representing our design concept concretely. With the flowchart, we can break down a complex software design into several functional modules and design each module individually.
In the main program design, we first initialize components, including the display module. Then, we determine whether P1.1 is high or low to decide whether to measure body temperature or heart rate.
4.1.1 Flowchart of the Main Program
4.1.2 Overview of the ISD1820 Voice Module Functions
The ISD1820 module primarily offers three functions: recording, level-controlled playback, and pulse-triggered playback.
Recording Subroutine
Controlling the recording process involves two main parameters: 1) the starting address for recording, and 2) the duration of the recording. By managing these two parameters, you can determine which segments the audio will be recorded into. Note: The REC signal is delayed by 50ms to prevent debounce and avoid repeated triggering. When invoking the recording subroutine, simply provide the starting address and the desired recording duration.
Level-Controlled Playback Subroutine
For level-controlled playback, both the starting address and playback time are essential. Controlling these two parameters will define the content being played back. It is important to note that playback always commences from the beginning of a segment. For segmented playback control, each recording's start must align with the beginning of a segment. To invoke the level-controlled playback subroutine, just provide the playback starting address and duration.
Pulse-Triggered Playback Subroutine
Pulse-triggered playback differs slightly from level-controlled playback. Here, the playback duration cannot be controlled via a microcontroller; only the starting address can be managed. Once initiated, pulse-triggered playback continues until either an end marker or the chip's memory limit is reached. Therefore, it is less commonly used for segmented voice control. To call the pulse-triggered playback subroutine, simply supply the starting address.
4.2 Heart Rate Measurement Program Design
4.2.1 Program Design for Heart Rate Measurement
The heart rate measurement program consists of two parts. The first part involves initialization, including setting up timers/counters, configuring stack pointers, and enabling interrupts. The second part activates two timers/counters and invokes display and voice broadcast subroutines to complete the heart rate display, voice announcement, and alarm module functionalities.
4.2.2 Interrupt Service Routine Design
TAG: Pulse sensor; Electronic component; Electronic products design
0 notes
Text
#STMicroelectronics#STM32WBA6#wireless#microcontroller#IoT_applications#powerelectronics#powermanagement#powersemiconductor
0 notes
Text
Making USB devices - end to end guide to your first gadget
0 notes
Text
Adapting HX711 modules for 3.3V Operation
The HX711 is a versatile integrated circuit (IC) designed for precision analog-to-digital (A/D) conversion, particularly suited for strain gauge load cell applications. It features a 24-bit A/D converter with a differential input stage capable of handling both single-ended and differential input signals. Additionally, this device offers adjustable gain amplification to accommodate various load cell sensitivities.

A common module based on the HX711 available in the market, including on AliExpress, is shown below. This module utilizes its internal analog supply regulator, which ensures a stable analog supply (AVDD) for the ADC and other internal components. The output voltage of the regulator (AVDD) is calculated using the following formula: VAVDD = VBG × (R1 + R2) / R2.

According to the electrical characteristics listed in the datasheet, the reference bypass voltage (VBG) is 1.25V. For the modules mentioned, R1 is set at 8.2kΩ and R2 at 20kΩ. By substituting these values into the formula, we calculate AVDD to be approximately 4.29V.

The HX711 IC operates within a voltage range of 2.6V to 5.5V. However, many HX711 modules on the market come with an internal voltage regulator that outputs approximately 4.29V. This can pose challenges when using the module with 3.3V microcontrollers. Furthermore, the datasheet specifies that the output voltage of the regulator should be at least 100mV lower than the supply voltage (VSUP), making the current regulator's output voltage incompatible with 3.3V supply voltages.

To address this, we need to ensure that AVDD is within the 2.6V to 3.2V range to make the module compatible with both 3.3V and 5V systems. After conducting some calculations, we determined that replacing R1 with 10kΩ and R2 with either 15kΩ or 12kΩ would be ideal. Using a 15kΩ resistor gives an AVDD of 3.1V, while using a 12kΩ resistor reduces it to 2.75V. In one of our experimental boards, we opted to replace R2 with a 12kΩ resistor.

As a further test, we lowered the AVDD to approximately 1.6V, and at this voltage, the HX711 still produced the correct results in our test setup. Interestingly, we observed that swapping R1 and R2 allows us to achieve an AVDD of 1.76V. To test this, we swapped R1 (8.2kΩ) and R2 (20kΩ) in one of the modules, and after applying a 5V supply, we noted that the AVDD returned at 1.65V, with the HX711 still providing correct outputs.

To evaluate the boards, we created a quick prototype using the STM32F405 MCU. In this prototype, we powered the HX711 module with 3.3V and directly connected its I/O pins to the STM32 GPIO pins.
For interaction with the module, we utilized the HX711 library provided at https://github.com/PCov3r/HX711-STM32-Library. The source code for our test firmware is available here.
After making the above modifications, all modules produce a stable output at 3.3V. We tested these modules with both 3.3V and 5V MCUs, using 5kg, 10kg, and 20kg load cells, and it operated correctly across all these combinations.
0 notes
Text
STMicroelectronics announced that the 40nm MCU will be produced by Huahong Group, the second-largest wafer foundry in China.
On November 21st, news came that STMicroelectronics, a major European chipmaker, held an Investor Day event in Paris, France on Wednesday local time. It announced that it would cooperate with the second-largest wafer foundry in China to produce 40nm-node microcontrollers (MCU) in China to support the achievement of its medium- and long-term revenue goals.

STMicroelectronics, through the implementation of a manufacturing restructuring plan and a cost base adjustment plan, is expected to save up to several million dollars compared to the current cost by 2027. The expected revenue for 2027 - 2028 is about 180 billion US dollars, and the operating profit margin is between 22% and 24%.
To support the achievement of this goal, Jean-Marc Chery, the CEO of STMicroelectronics, announced on Wednesday local time that he would cooperate with Huahong Group, the second-largest wafer foundry in China, and planned to produce 40nm MCU in China by the end of 2025. He believed that local manufacturing in China was crucial for its competitive position.

Fabio Gualandris, the manufacturing director of STMicroelectronics, said that other reasons for manufacturing in China included the cost-effectiveness of the local supply chain, compatibility issues, and the risk of government restrictions. In addition, producing chips anywhere else meant missing out on the rapid electric vehicle development cycle in China.
"They are moving faster," he said. "If you are not here, you cannot respond in a timely manner."
When Jean-Marc Chery made the above remarks, major countries and regions around the world such as the United States, Europe, China, and Japan were all actively promoting more chip manufacturing locally, and many chip companies had been expanding in Singapore and Malaysia to serve the Asian market.

However, STMicroelectronics is the largest manufacturer of energy-saving silicon carbide (SiC) chips for electric vehicles, and its customers include Tesla and Geely. The company said that the Chinese market, as the largest and most innovative market for electric vehicles, was an indispensable market and it was impossible to fully compete from the outside.
Jean-Marc Chery said, "If we cede the market share in China to another company working in the industrial or the automotive field, that is, a Chinese enterprise, they will dominate their own market. And their domestic market is so huge that it will be an excellent platform for them to compete in other countries."

According to STMicroelectronics' plan, the plan to manufacture its STM32 series products in China will help STMicroelectronics expand its customer base by 50% in the next five years.
He added that STMicroelectronics was adopting the best practices and technologies learned in the Chinese market and applying them to the Western market. "The story of the missionary is over," he said.
Before Jean-Marc Chery made the above remarks to reporters in Paris, the company had been hit hard by the downturn in the industrial chip market.

ICGOODFIND recommends a complete list of commonly used chips of STMicroelectronics:
STM32F302C8T6 LQFP-48_7x7x05P
STM32F302CBT6 LQFP-48_7x7x05P
STM32F302CBT6TR LQFP-48(7x7)
STM32F302CCT6 48-LQFP
STM32F302CCT7 LQFP-48(7x7)
STM32F302K6U6 32-UFQFN 裸露焊盘
STM32F302K8U6 UFQFPN-32
STM32F302K8U6TR UFQFN-32(5x5)
STM32F302R6T6 LQFP-64(10x10)
STM32F302R8T6 LQFP-64
STM32F302RBT6 LQFP-64
STM32F302RBT6TR LQFP-64(10x10)
STM32F302RBT7 LQFP-64(10x10)
STM32F302RBT7TR LQFP-64(10x10)
STM32F302RCT6 LQFP-64
STM32F302RCT6TR
STM32F302RCT7TR
STM32F302RDT6 LQFP-64(10x10)
STM32F302RDT6TR
STM32F302RET6 LQFP-64(10x10)
STM32F302RET6TR LQFP-64(10x10)
STM32F302VBT6 LQFP-100(14x14)
STM32F302VCT6 LQFP-100(14x14)
STM32F302VCT7 LQFP-100(14x14)
STM32F302VDH6 UFBGA-100(7x7)
STM32F302VDT6 100-LQFP
STM32F302VET6 LQFP-100(14x14)
STM32F302ZET6 LQFP-144(20x20)
STM32F303C6T6 LQFP-48(7x7)
STM32F303C8T6 LQFP-48_7x7x05P
STM32F303CBT6 LQFP-48_7x7x05P
STM32F303CBT6TR LQFP-48(7x7)
STM32F303CBT7 LQFP-48(7x7)
STM32F303CCT6 LQFP-48_7x7x05P
STM32F303CCT6TR LQFP-48(7x7)
STM32F303CCT7 48-LQFP
STM32F303K6T6 LQFP-32(7x7)
STM32F303K8T6 LQFP-32_7x7x08P
STM32F303R6T6 LQFP-64(10x10)
STM32F303R8T6 LQFP-64_10x10x05P
STM32F303RBT6 LQFP-64_10x10x05P
STM32F303RBT6TR LQFP-64(10x10)
STM32F303RBT7 64-LQFP
STM32F303RBT7TR LQFP-64(10x10)
STM32F303RCT6 LQFP-64_10x10x05P
STM32F303RCT6TR LQFP-64
STM32F303RCT7 LQFP-64
STM32F303RDT6 LQFP-64(10x10)
STM32F303RDT7 QFP64
STM32F303RET6 LQFP-64_10x10x05P
STM32F303RET6TR LQFP-64(10x10)
STM32F303RET7 LQFP-64
STM32F303VBT6 LQFP-100(14x14)
STM32F303VBT6TR LQFP-100(14x14)
STM32F303VCT6 LQFP-100_14x14x05P
STM32F303VCT6TR LQFP-100(14x14)
STM32F303VCT7 LQFP-100_14x14x05P
STM32F303VDT6 LQFP-100(14x14)
STM32F303VEH6 UFBGA-100(7x7)
STM32F303VET6 LQFP-100
STM32F303VET6TR LQFP-100(14x14)
STM32F303VET7 LQFP-100(14x14)
STM32F303ZDT6 LQFP-144(20x20)
STM32F303ZET6 LQFP-144_20x20x05P
STM32F303ZET7 LQFP-144(20x20)
STM32F334C6T6 LQFP-48
STM32F334C6T6TR
STM32F334C8T6 LQFP-48_7x7x05P
STM32F334C8T7 LQFP-48(7x7)
STM32F334C8T7TR LQFP-48(7x7)
STM32F334K4T6 LQFP-32
STM32F334K6T6 LQFP-32_7x7x08P
STM32F334K8T6 LQFP-32_7x7x08P
STM32F334K8T7 LQFP-32(7x7)
STM32F334K8U6 UFQFPN-32(5x5)
STM32F334R6T6 LQFP-64_10x10x05P
STM32F334R8T6 LQFP-64_10x10x05P
STM32F334R8T7 LQFP-64(10x10)
STM32F334R8T7TR LQFP-64(10x10)
STM32F358VCT6 LQFP-100(14x14)
STM32F373C8T6 LQFP-48
STM32F373C8T6TR LQFP-48(7x7)
STM32F373CBT6 LQFP-48(7x7)
STM32F373CCT6 LQFP-48_7x7x05P
STM32F373CCT6TR LQFP-48(7x7)
STM32F373CCT7 LQFP-48(7x7)
STM32F373R8T6 LQFP-64(10x10)
STM32F373RBT6 LQFP-64_10x10x05P
STM32F373RCT6 LQFP-64_10x10x05P
STM32F373RCT6TR LQFP-64(10x10)
STM32F373V8H6 UFBGA-100(7x7)
STM32F373V8T6 LQFP-100
STM32F373VBH6 100-UFBGA
STM32F373VBT6 100-LQFP
STM32F373VBT7 LQFP-100(14x14)
STM32F373VCH6 100-UFBGA
STM32F373VCH7 UFBGA-100(7x7)
STM32F373VCT6 LQFP-100
STM32F3DISCOVERY
STM32F400CBT6 LQFP-48
STM32F400RBT6 -
STM32F401CBU6 QFN-48
STM32F401CBU6TR 48-UFQFN 裸露焊盘
STM32F401CBU7 UFQFPN-48(7x7)
STM32F401CBY6
STM32F401CBY6TT
STM32F401CCU6 UFQFPN-48
STM32F401CCU6TR UFQFPN-48(7x7)
STM32F401CCU7 48-UFQFN 裸露焊盘
STM32F401CCY6
STM32F401CCY6TR 49-UFBGA,WLCSP
STM32F401CCY6TT WLCSP-49
STM32F401CDU6 48-UFQFN 裸露焊盘
STM32F401CDU6TR UFQFPN-48
STM32F401CEU6 UFQFPN-48
STM32F401CEU6TR 48-VFQFN 裸露焊盘
STM32F401CEY6TR 49-UFBGA,WLCSP
STM32F401RBT6 LQFP-64_10x10x05P
STM32F401RBT6TR 64-LQFP
STM32F401RCT6 LQFP-64_10x10x05P
STM32F401RCT6TR LQFP-64(10x10)
STM32F401RCT7 LQFP-64(10x10)
STM32F401RDT6 64-LQFP
STM32F401RET
STM32F401RET6 LQFP-64_10x10x05P
STM32F401RET6TR LQFP-64(10x10)
STM32F401VBH6 100-UFBGA
STM32F401VBT6 LQFP-100(14x14)
STM32F401VCH6 100-UFBGA
STM32F401VCT6 LQFP-100
STM32F401VDH6 UFBGA-100(7x7)
STM32F401VDT6 LQFP-100(14x14)
STM32F401VEH6 UFBGA-100(7x7)
STM32F401VET6 LQFP-100(14x14)
STM32F402RCT6 LQFP-64
STM32F402VCT6 LQFP-100
STM32F405OEY6TR WLCSP-90(4.223x3.969mm)
STM32F405OGY6
STM32F405OGY6TR WLCSP-90(4.22x3.97)
STM32F405RG
STM32F405RGT
STM32F405RGT6 LQFP-64_10x10x05P
STM32F405RGT6TR LQFP-64(10x10)
STM32F405RGT6V LQFP-64(10x10)
STM32F405RGT6W LQFP-64(10x10)
STM32F405RGT7 LQFP-64(10x10)
STM32F405RGT7TR LQFP-64(10x10)
STM32F405VGT6 LQFP-100_14x14x05P
STM32F405VGT6TR LQFP-100(14x14)
STM32F405VGT7 LQFP-100(14x14)
STM32F405VGT7TR LQFP-100(14x14)
STM32F405ZGT6 LQFP-144_20x20x05P
STM32F405ZGT7 144-LQFP
STM32F407
STM32F407G-DISC1
STM32F407IEH6 UFBGA-201
STM32F407IET6 LQFP-176_24x24x05P
STM32F407IGH6 UFBGA-201(10x10)
STM32F407IGH6TR 201-UFBGA
STM32F407IGH7 UFBGA-201(10x10)
STM32F407IGT
STM32F407IGT6 LQFP-176_24x24x05P
STM32F407IGT7 LQFP-176(24x24)
STM32F407VCT6
STM32F407VE
STM32F407VET
STM32F407VET6 LQFP-100_14x14x05P
STM32F407VET6TR 100-LQFP
STM32F407VET7
STM32F407VG
STM32F407VGT
STM32F407VGT6 LQFP-100_14x14x05P
STM32F407VGT6TR LQFP-100
STM32F407VGT7 LQFP-100
STM32F407VGT7TR LQFP-100(14x14)
STM32F407ZET6 LQFP-144_20x20x05P
STM32F407ZET7 LQFP-144(20x20)
STM32F407ZG
STM32F407ZGT6 LQFP-144_20x20x05P
STM32F407ZGT6TR LQFP-144
STM32F407ZGT7 LQFP-144
STM32F410C8U6 UFQFPN-48(7x7)
STM32F410CBT3 LQFP-48(7x7)
STM32F410CBT6 LQFP-48(7x7)
STM32F410CBU3 UFQFPN-48
STM32F410CBU6 UFQFN-48
STM32F410R8T6 64-LQFP
STM32F410RBT6 LQFP-64_10x10x05P
STM32F410RBT7 LQFP-64(10x10)
STM32F410TBY6TR WLCSP-36
STM32F411CCU6
STM32F411CCU6TR UFQFPN-48
STM32F411CCY6
STM32F411CCY6TR WLCSP-49
STM32F411CEU6 UFQFPN-48
STM32F411CEU6TR UFQFPN-48(7x7)
STM32F411CEY6
STM32F411CEY6TR WLCSP49
STM32F411RCT6 LQFP-64
STM32F411RCT6TR -
STM32F411RE
STM32F411RET6 LQFP-64_10x10x05P
STM32F411RET6TR LQFP-64(10x10)
STM32F411RET7 64-LQFP
STM32F411VCH6 UFBGA-100(7x7)
STM32F411VCT6 LQFP-100(14x14)
STM32F411VCT6TR LQFP-100(14x14)
STM32F411VEH6 UFBGA-100(7x7)
STM32F411VEH6TR
STM32F411VET6 LQFP-100
STM32F411VET6TR LQFP-100(14x14)
STM32F412CEU6 UFQFPN-48(7x7)
STM32F412CGU6 UFQFPN-48(7x7)
STM32F412CGU6TR UFQFPN-48(7x7)
STM32F412RET6 LQFP-64_10x10x05P
STM32F412RET6TR LQFP-64(10x10)
STM32F412REY6TR 64-UFBGA,WLCSP
STM32F412RGT6 LQFP-64_10x10x05P
STM32F412RGT6TR LQFP-64(10x10)
STM32F412RGY6
STM32F412RGY6TR WLCSP-64(3.62x3.65)
STM32F412VEH6 UFBGA-100(7x7)
STM32F412VET3 LQFP-100(14x14)
STM32F412VET6 LQFP-100(14x14)
STM32F412VET6TR LQFP-100(14x14)
STM32F412VGH6 100-UFBGA
STM32F412VGT6 LQFP-100-14x14x05P
STM32F412VGT6TR LQFP-100(14x14)
STM32F412ZEJ6 UFBGA-144(10x10)
STM32F412ZET6 LQFP-144(20x20)
STM32F412ZGJ6 UFBGA-144(10x10)
STM32F412ZGJ6TR UFBGA-144(10x10)
STM32F412ZGT6 LQFP-144
STM32F413CGU6 UFQFPN-48(7x7)
STM32F413CHU3 48-UFQFN 裸露焊盘
STM32F413CHU6 UFQFPN-48(7x7)
STM32F413RGT6 LQFP-64
STM32F413RHT3 LQFP-64(10x10)
STM32F413RHT6 64-LQFP
STM32F413VGH6 UFBGA-100(7x7)
STM32F413VGT3 LQFP-100(14x14)
STM32F413VGT6 LQFP-100(14x14)
STM32F413VGT6TR LQFP-100(14x14)
STM32F413VHT6 LQFP-100(14x14)
STM32F413ZGJ6 UFBGA-144
STM32F413ZGT6 LQFP-144(20x20)
STM32F413ZHJ6 144-UFBGA
STM32F413ZHT6 LQFP-144(20x20)
STM32F415OGY6TR 90-UFBGA,WLCSP
STM32F415RGT6 LQFP-64_10x10x05P
STM32F415RGT6TR LQFP-64(10x10)
STM32F415VGT6 LQFP-100_14x14x05P
STM32F415VGT6TR LQFP-100(14x14)
STM32F415ZGT6 LQFP-144(20x20)
STM32F417IEH6 201-UFBGA
STM32F417IET6 LQFP-176(24x24)
STM32F417IGH6 UFBGA
STM32F417IGT6 LQFP
STM32F417IGT7 LQFP-176(24x24)
STM32F417VET6 LQFP-100(14x14)
STM32F417VGT6 LQFP-100
STM32F417VGT6TR LQFP-100
STM32F417VGT7 LQFP-100(14x14)
STM32F417ZET6 144-LQFP
STM32F417ZG
STM32F417ZGT6 LQFP-144
STM32F417ZGT6TR
STM32F417ZGT7
STM32F423CHU6 UFQFPN-48(7x7)
STM32F423RHT6 LQFP-64(10x10)
STM32F423RHT6TR LQFP-64(10x10)
STM32F423VHT6 LQFP-100(14x14)
STM32F423ZHJ6 UFBGA-144(10x10)
STM32F423ZHT6 LQFP-144(20x20)
STM32F427AGH6 UFBGA-169(7x7)
STM32F427AIH6 UFBGA-169(7x7)
STM32F427IGH6 UFBGA-201
STM32F427IGH6TR 201-UFBGA
STM32F427IGH7 UFBGA-201
STM32F427IGT6 LQFP-176_24x24x05P
STM32F427IIH6 UFBGA-201(10x10)
STM32F427IIH6TR 201-UFBGA
STM32F427IIH7 UFBGA-201(10x10)
STM32F427IIT6 LQFP-176
STM32F427IIT7 LQFP-176(24x24)
STM32F427VGT6 LQFP-100_14x14x05P
STM32F427VGT6TR LQFP-100(14x14)
STM32F427VIT6 LQFP-100_14x14x05P
STM32F427VIT6TR 100-LQFP
STM32F427VIT7
STM32F427VIT7TR LQFP-100(14x14)
STM32F427ZGT6 LQFP-144_20x20x05P
STM32F427ZGT6TR -
STM32F427ZIT6 LQFP-144_20x20x05P
STM32F427ZIT7 LQFP-144(20x20)
STM32F429AGH6 169-UFBGA
STM32F429AIH6 UFBGA-169(7x7)
STM32F429BET6 208-LQFP
STM32F429BGT6 LQFP-208_28x28x05P
STM32F429BIT6 LQFP-208_28x28x05P
STM32F429BIT7 LQFP-208(28x28)
STM32F429IEH6 UFBGA-201
STM32F429IET6 LQFP-176_24x24x05P
STM32F429IGH6 UFBGA-201
STM32F429IGT6 LQFP-176_24x24x05P
STM32F429IIH6 UFBGA-201
STM32F429IIH6TR
STM32F429IIT6 LQFP-176_24x24x05P
STM32F429NEH6 216-TFBGA
STM32F429NGH6 TFBGA-216(13x13)
STM32F429NIH6 TFBGA-216
STM32F429NIH7 TFBGA-216(13x13)
STM32F429VET6 LQFP-100_14x14x05P
STM32F429VET6TR LQFP-100(14x14)
STM32F429VGT6 LQFP-100_14x14x05P
STM32F429VGT6TR LQFP-100(14x14)
STM32F429VIT6 LQFP-100_14x14x05P
STM32F429ZET6 LQFP-144_20x20x05P
STM32F429ZGT6 LQFP-144_20x20x05P
STM32F429ZGT6TR LQFP-144(20x20)
STM32F429ZGY6TR WLCSP-143(4.52x5.55)
STM32F429ZIT
STM32F429ZIT6 LQFP-144_20x20x05P
STM32F429ZIT6TR LQFP-144(20x20)
STM32F429ZIT6U
STM32F429ZIY6
STM32F429ZIY6TR WLCSP-143(4.52x5.55)
STM32F437AIH6 UFBGA-169(7x7)
STM32F437IGT6 176-LQFP
STM32F437IIH6 UFBGA-201
STM32F437IIH6TR UFBGA-201
STM32F437IIT6 LQFP-176(24x24)
STM32F437VGT6 100-LQFP
STM32F437VIT6 LQFP-100(14x14)
STM32F437VIT6TR LQFP-100(14x14)
STM32F437VIT7 LQFP-100(14x14)
STM32F437ZGT6 LQFP-144(20x20)
STM32F437ZIT6 LQFP-144(20x20)
STM32F437ZIT7 LQFP-144(20x20)
STM32F439BIT6 LQFP-208(28x28)
STM32F439IGH6 UFBGA-201
STM32F439IGT6 LQFP-176
STM32F439IIH6 201-UFBGA
STM32F439IIT6 LQFP-176(24x24)
STM32F439NGH6 TFBGA-216(13x13)
STM32F439NIH6 TFBGA-216(13x13)
STM32F439VGT6 LQFP-100(14x14)
STM32F439VIT6 100-LQFP
STM32F439ZGT6 LQFP-144(20x20)
STM32F439ZGY6TR WLCSP-143(4.52x5.55)
STM32F439ZIT6 LQFP-144(20x20)
STM32F446MCY6TR UFBGA-81
STM32F446MEY6TR WLCSP-81(3.80x3.69)
STM32F446RCT6 LQFP-64
STM32F446RCT6TR 64-LQFP
STM32F446RCT7 LQFP-64(10x10)
STM32F446RCT7TR LQFP-64(10x10)
STM32F446RET6 LQFP-64_10x10x05P
STM32F446RET6TR 64-LQFP
STM32F446RET7 LQFP-64(10x10)
STM32F446VCT6 LQFP-100
STM32F446VET6 LQFP-100_14x14x05P
STM32F446VET6TR LQFP-100(14x14)
STM32F446VET7 LQFP-100(14x14)
STM32F446ZCH6 UFBGA-144
STM32F446ZCJ6 UFBGA-144(10x10)
STM32F446ZCT6 LQFP-144_20x20x05P
STM32F446ZEH6 144-UFBGA
STM32F446ZEJ6 UFBGA-144(10x10)
STM32F446ZEJ6TR UFBGA-144(10x10)
STM32F446ZEJ7 UFBGA-144(10x10)
STM32F446ZET6 LQFP-144(20x20)
STM32F446ZET7 144-LQFP
STM32F469AGH6 BGA-169(7x7)
STM32F469AIH6 UFBGA-169(7x7)
STM32F469AIY6TR WLCSP-168(4.89x5.69)
STM32F469BET6 LQFP-208(28x28)
STM32F469BGT6 208-LQFP
STM32F469BIT6 LQFP-208(28x28)
STM32F469BIT7 LFQFP-208(28x28)
STM32F469IGH6 201-UFBGA
STM32F469IGT6 LQFP-176(24x24)
STM32F469IIH6 UFBGA-201
STM32F469IIT6 LQFP-176_24x24x05P
STM32F469NEH6 TFBGA-216(13x13)
STM32F469NGH6 TFBGA-216(13x13)
STM32F469NIH6 TFBGA-216(13x13)
STM32F469VET6 LQFP-100(14x14)
STM32F469VGT6 LQFP-100
STM32F469VIT6 100-LQFP
STM32F469ZET6 LQFP-144(20x20)
STM32F469ZGT6 LQFP-144(20x20)
STM32F469ZIT6 144-LQFP
STM32F479BGT6 LQFP-208(28x28)
STM32F479IIT6 176-LQFP
STM32F479NGH6 TFBGA-216(13x13)
STM32F479NIH6 -
STM32F479VGT6 100-LQFP
STM32F722IEK6 UFBGA-176(10x10)
STM32F722IET6 LQFP-176(24x24)
STM32F722RCT6 64-LQFP
STM32F722RET6 LQFP-64_10x10x05P
STM32F722RET7 LQFP-64(10x10)
STM32F722VCT6 LQFP-100(14x14)
STM32F722VET6 LQFP-100_14x14x05P
STM32F722ZCT6 144-LQFP
STM32F722ZET6 LQFP-144(20x20)
STM32F723IEK6 UFBGA-201(10x10)
STM32F723IET6 LQFP-176(24x24)
STM32F723ZCT6 LQFP-144(20x20)
STM32F723ZEI6 UFBGA-144(7x7)
STM32F723ZET6 LQFP-144(20x20)
STM32F723ZET7 LQFP-144(20x20)
STM32F730R8T6 LQFP-64
STM32F730V8T6 LQFP-100
STM32F730Z8T6 LQFP-144(20x20)
STM32F732RET6 LQFP-64(10x10)
STM32F743IIT6
STM32F745IEK6 UFBGA-201
STM32F745IET6 LQFP-176(24x24)
STM32F745IET7 LQFP-176(24x24)
STM32F745IGK6 UFBGA-201
STM32F745IGT6 LQFP-176(24x24)
STM32F745VEH6 100-UFBGA
STM32F745VEH6TR 100-UFBGA
STM32F745VET6 LQFP-100_14x14x05P
STM32F745VGH6 TFBGA-100(8x8)
STM32F745VGT6 LQFP-100_14x14x05P
STM32F745ZET6 144-LQFP
STM32F745ZGT6 LQFP-144
STM32F745ZGT7 LQFP-144(20x20)
STM32F746BET6 LQFP-208(28x28)
STM32F746BGT6 LQFP-208(28x28)
STM32F746BGT7 LQFP-208(28x28)
STM32F746G-DISCO Module
STM32F746IEK6 UFBGA-176(10x10)
STM32F746IET6 LQFP-176(24x24)
STM32F746IGK6 UFBGA-201
STM32F746IGK7 UFBGA-201
STM32F746IGT6 LQFP-176
STM32F746IGT7 LQFP-176(24x24)
STM32F746NEH6 216-TFBGA
STM32F746NGH6 TFBGA-216
STM32F746NGH6U
STM32F746NGH7 TFBGA-216(13x13)
STM32F746VET6 LQFP-100_14x14x05P
STM32F746VET6TR LQFP-100(14x14)
STM32F746VGH6 TFBGA-100(8x8)
STM32F746VGT6 LQFP-100_14x14x05P
STM32F746VGT7 LQFP-100(14x14)
STM32F746ZET6 144-LQFP
STM32F746ZGT6 LQFP-144_20x20x05P
STM32F746ZGT7 LQFP-144(20x20)
STM32F750N8H6 TFBGA-216(13x13)
STM32F750V8T6 LQFP-100
STM32F750Z8T6 LQFP-144
STM32F756BGT6 LQFP-208(28x28)
STM32F756IGT6 LQFP-176(24x24)
STM32F756NGH6 TFBGA-216(13x13)
STM32F756VGH6 TFBGA-100(8x9)
STM32F756VGT6 LQFP-100(14x14)
STM32F756ZGT6 LQFP-144(20x20)
STM32F765BGT6 LQFP-208(28x28)
STM32F765BIT6 LQFP-208(28x28)
STM32F765IGK6 UFBGA-201
STM32F765IGT6 LQFP-176(24x24)
STM32F765IIK6 201-UFBGA
STM32F765IIT6 176-LQFP
STM32F765IIT7 LQFP-176(24x24)
STM32F765NGH6 TFBGA-216(13x13)
STM32F765NIH6 TFBGA-216(13x13)
STM32F765NIH7 TFBGA-216(13x13)
STM32F765VGH6 100-TFBGA
STM32F765VGT6 LQFP-100
STM32F765VIH6 TFBGA-100(8x8)
STM32F765VIT6 LQFP-100
STM32F765ZGT6 LQFP-144(20x20)
STM32F765ZGT7 144-LQFP
STM32F765ZIT6 144-LQFP
STM32F765ZIT7 LQFP-144(20x20)
STM32F767BGT6 LQFP-208_28x28x05P
STM32F767BIT6 LQFP-208_28x28x05P
STM32F767IGK6 201-UFBGA
STM32F767IGT6 LQFP-176_24x24x05P
STM32F767IIK6 UFBGA-201(10x10)
STM32F767IIT6 LQFP-176_24x24x05P
STM32F767NGH6 216-TFBGA
STM32F767NIH6 BGA-216
STM32F767NIH7 TFBGA-216(13x13)
STM32F767VGT6 LQFP-100
STM32F767VGT7 LQFP-100(14x14)
STM32F767VIH6 TFBGA-100(8x8)
STM32F767VIT6 LQFP-100_14x14x05P
STM32F767VIT7 LQFP-100(14x14)
STM32F767ZGT6 LQFP-144_20x20x05P
STM32F767ZIT6 LQFP-144_20x20x05P
STM32F769AIY6TR WLCSP-180(5.5x6)
STM32F769BGT6 LQFP-208(28x28)
STM32F769BIT6 LQFP-208_28x28x05P
STM32F769IGT6 LQFP-176_24x24x05P
STM32F769IIT6 LQFP-176(24x24)
STM32F769NGH6 TFBGA-216(13x13)
STM32F769NIH6 TFBGA-216(13x13)
STM32F777BIT6 208-LQFP
STM32F777IIK6 UFBGA-201
STM32F777IIT6 LQFP-176(24x24)
STM32F777IIT7 LQFP-176(24x24)
STM32F777NIH6 TFBGA-216
STM32F777NIH7 216-TFBGA
STM32F777VIH6 TFBGA-100(8x8)
STM32F777VIT6 100-LQFP
STM32F777ZIT6 LQFP
STM32F779AIY6
STM32F779AIY6TR WLCSP-180(5.5x6)
STM32F779BIT6 LQFP-208(28x28)
STM32F779IIT6 LQFP-176(24x24)
STM32F779NIH6 TFBGA-216(13x13)

ICGOODFIND Summary: In the ever-changing global semiconductor industry, the strategic layout of STMicroelectronics in the Chinese market is undoubtedly the focus of the industry. ICGOODFIND has always been closely following the industry dynamics. Through a series of measures such as cooperating with Chinese enterprises to produce 40nm MCU, STMicroelectronics focuses on both current cost control and revenue growth, and also looks to future market share expansion and technology exchange and integration, showing its unique strategic vision and firm confidence in the Chinese market. This "counter-trend" layout in a complex international situation not only paves a new path for its own development but also provides a new example for global semiconductor industry cooperation. We look forward to the smooth implementation of STMicroelectronics' strategic plan in the Chinese market to achieve mutual benefit and win-win results. At the same time, we hope that more enterprises can accurately grasp opportunities in the global market, actively promote industry innovation and collaborative development, and contribute to global technological progress.
1 note
·
View note